V2.7.0新功能
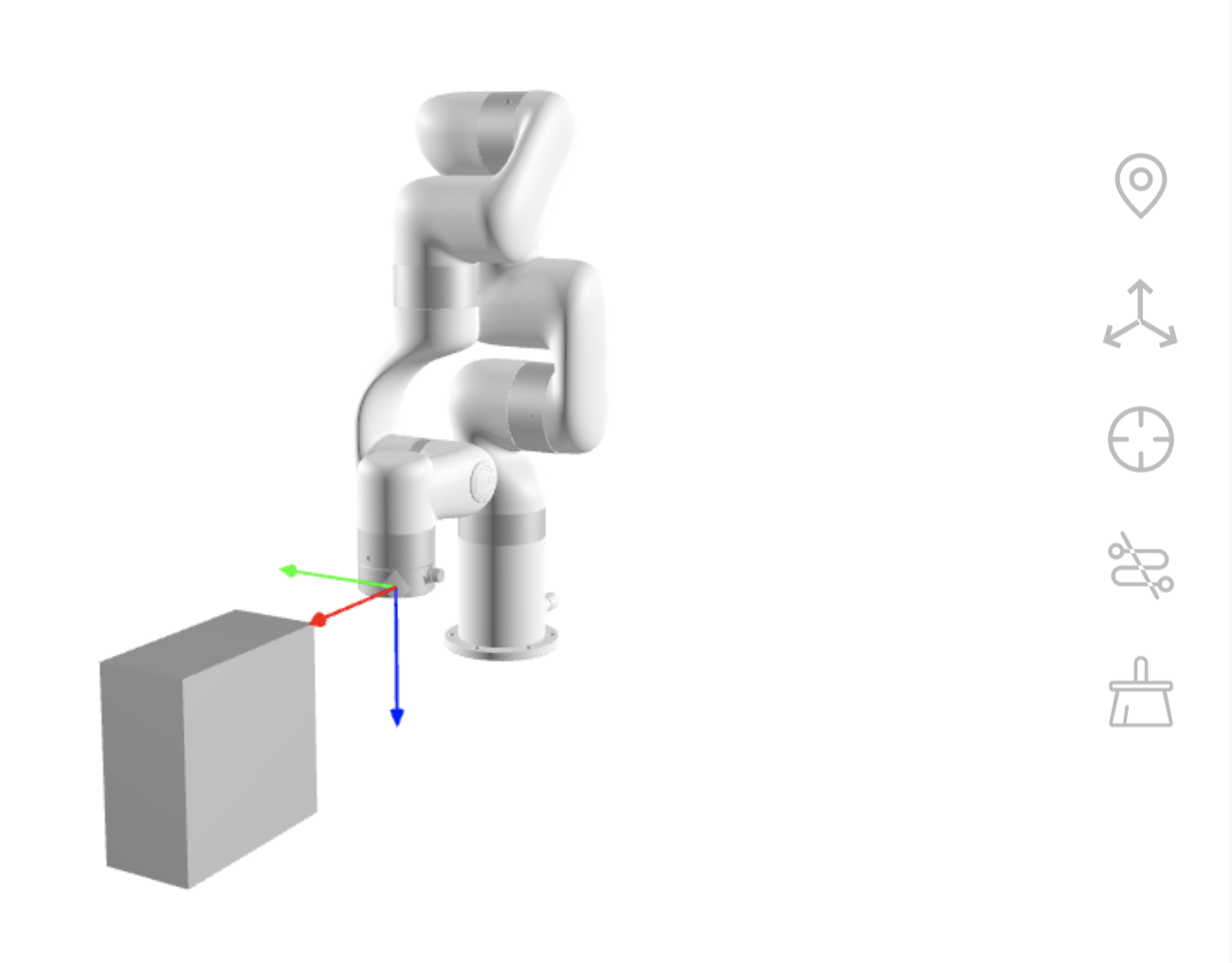
实时控制-末端自碰撞模型偏移
功能说明
用于设置末端自定义的自碰撞模型相对于工具坐标系的Z方向的偏移量,用于调整碰撞模型的位置。

设置偏移后,效果如下
实时控制-末端执行器-真空吸头
功能说明
- 新增选择连接方式:插接式连接、触点连接
- 仅针对850,xArm(≥1305)

实时控制-末端执行器模型
功能说明
- 兼容UFACTORY机械爪G2,因时RH56DFX灵巧手,大寰DH-PGC-140-50机械爪,支持控制及添加自碰撞模型。

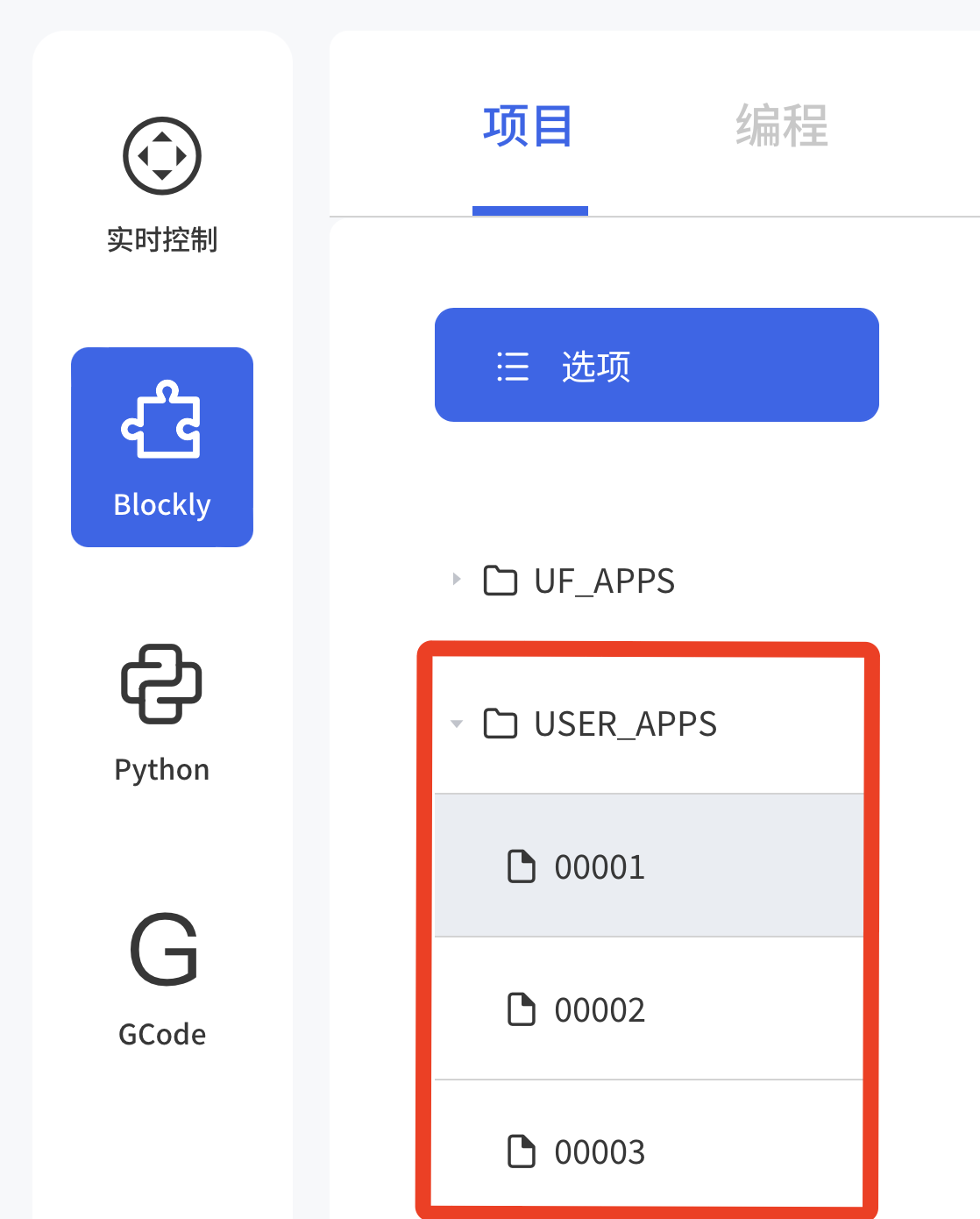
Blockly编程-文件名
功能说明
- 文件名增加排序逻辑。如按顺序新建文件名为003, 002, 001的项目,显示如下
Blockly编程-外接设备-透传
功能说明
- 用于机械臂和末端执行器或控制器进行RS485通信,机械臂只进行转发,不添加处理数据。
- 可选参数:机械臂(末端)、控制盒
下面这个程序为,打开UFACTORY机械爪G2,并获取其的位置。 
设置-运动参数-TCP设置
功能说明
- 新增因时RH56DFX、大寰DH-PGC-140-50的TCP 负载与偏移参数。

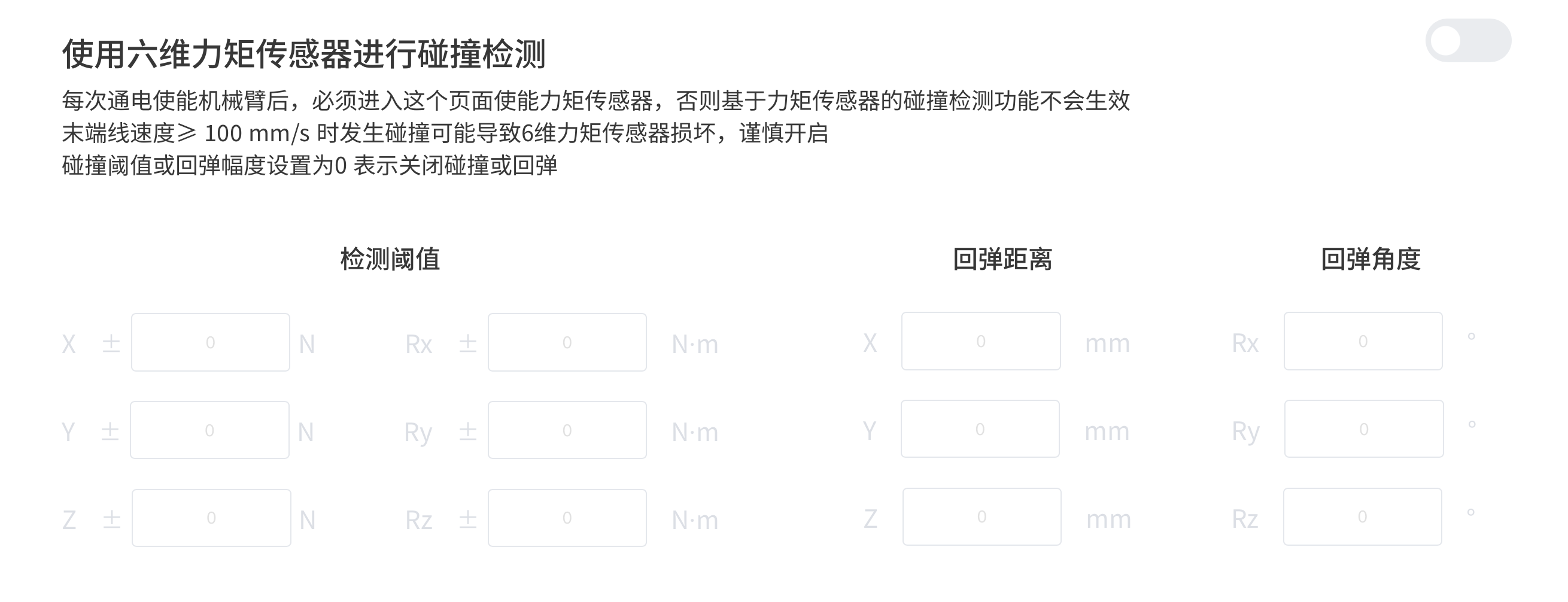
设置-外接设备-力矩传感器
功能说明
- 增加力矩传感器碰撞检测开关和碰撞检测参数配置。
- 可配置参数:检测阈值、回弹距离、回弹角度。
- 末端线速度≥100mm/s时可能会撞坏传感器,请谨慎开启。
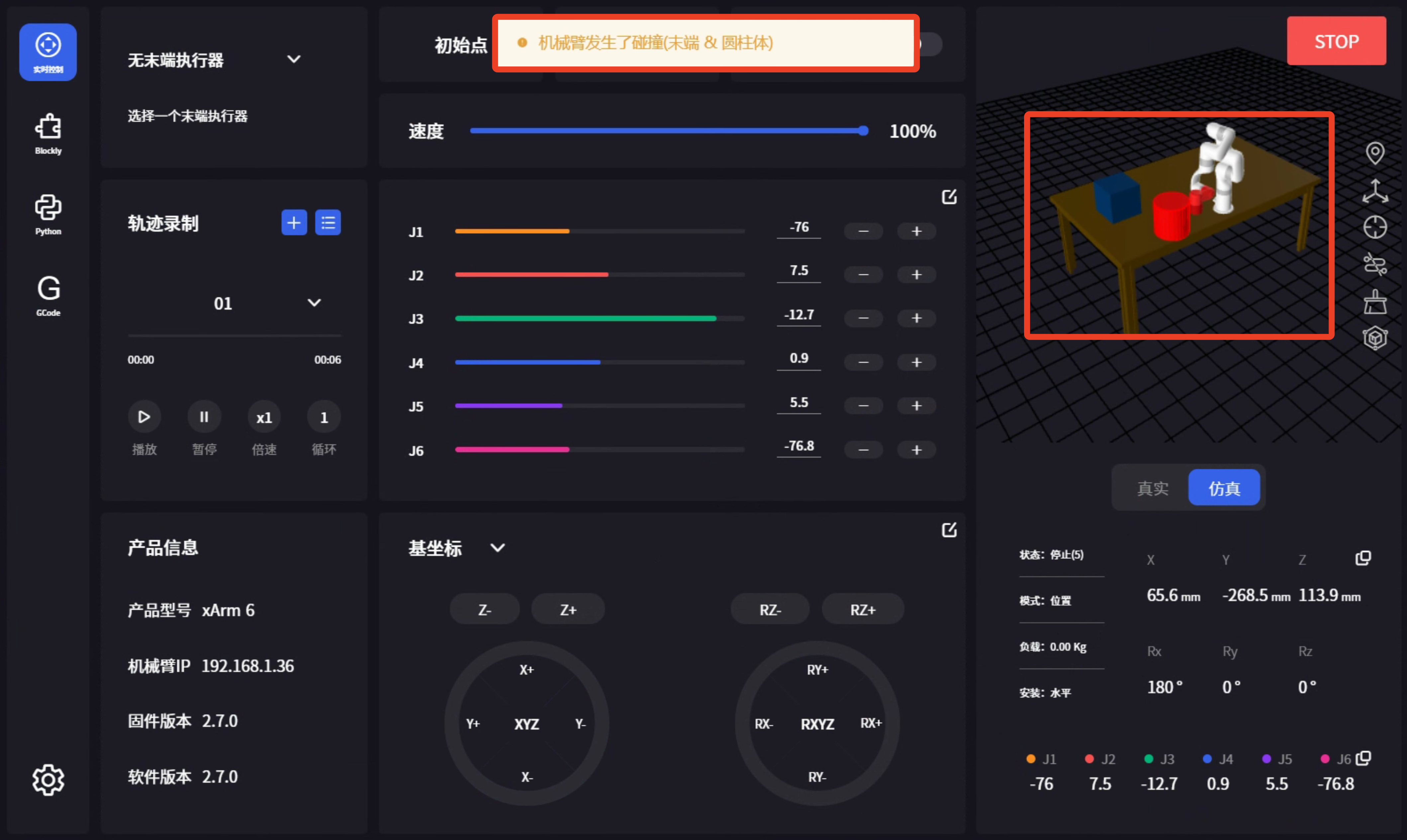
设置-辅助功能-环境仿真(测试预览版)
功能说明
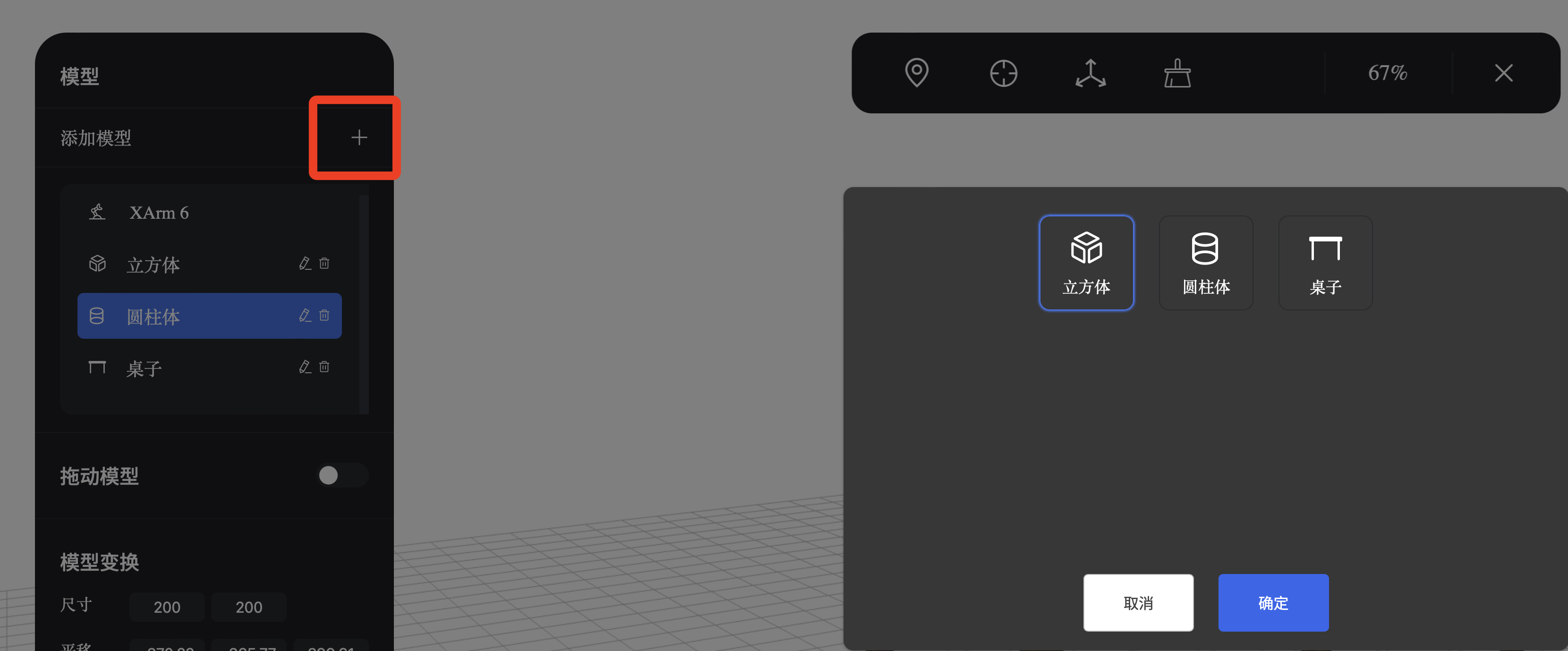
在通用设置-辅助功能中,打开环境仿真选项。(此功能还在测试中)


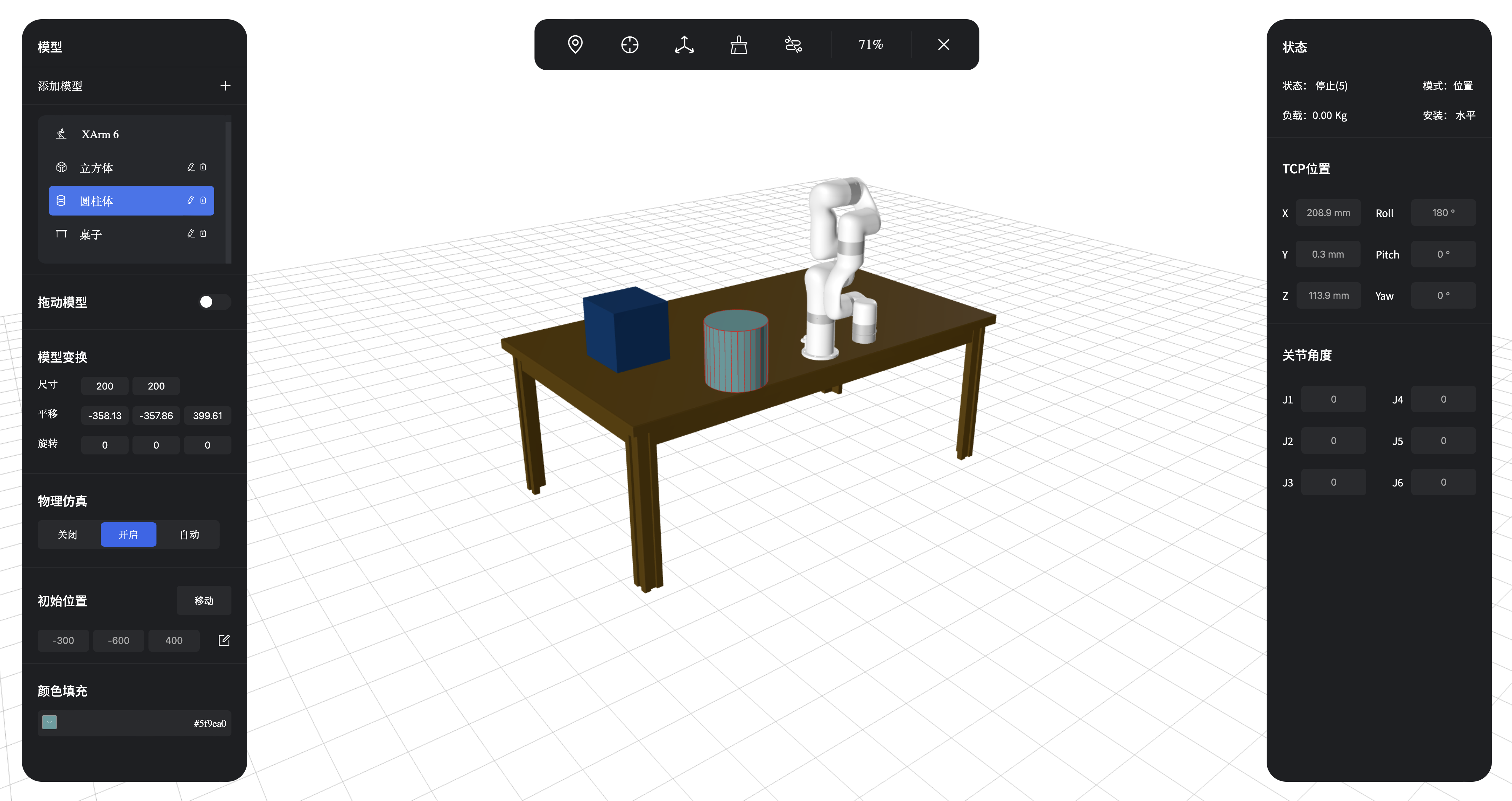
可在环境中增加模型:立方体、圆柱体、桌子。
选中模型后,可开启拖动模型选项,将模型拖动到对应的位置。也可以打开物理仿真,考虑真实重力及碰撞情况。
若发生碰撞,软件会弹窗相应的提示,如下图